冀州区海河启闭机厂
 第5年
第5年

 第5年
第5年 
第5年








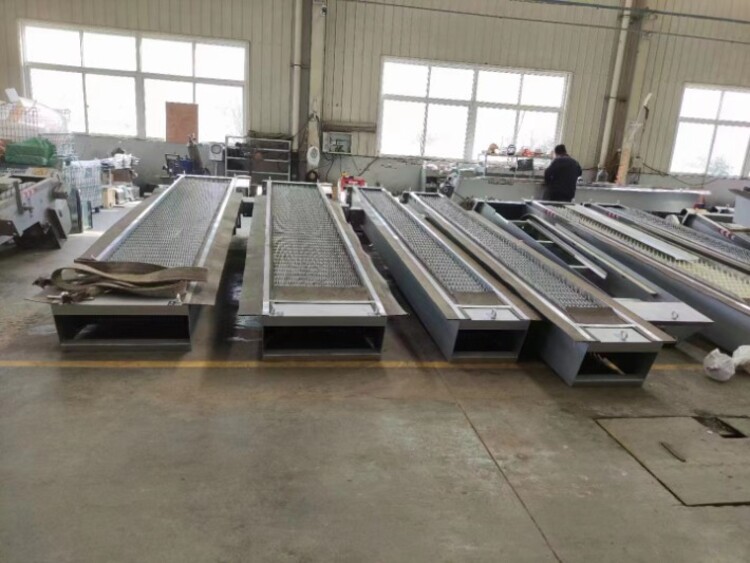
赣州格栅除污机 上饶不锈钢机械格栅机
清污机工作原理如下:
清污机横向行走至需要清污的工位,自动对轨道定位后,耙斗由卸污工位下降,当耙斗下降至拦污栅面时,耙斗打开并继续下降。待下降至清污深度后,耙斗闭合,耙齿插入栅条一定深度,然后耙斗上升并清除栅面污物。耙斗上升至清污机卸污工位后,耙斗打开,污物倒入排污槽内,冲洗水流再将污物冲走。
1. 耙斗小车:因原设计者(加拿大人)设计的拦污栅为一栅两用,在正常发电时拦污栅起过水拦污的作用,当发电机机组维修时,在栅体上装上面板即可作为检修门使用,所以为节省土建和栅体结构的工作量,在栅体顶部到大坝水平面间没有混凝土和栅条,根据实际情况我们设计了耙斗小车,工作原理是耙斗在下降过程中,打开耙斗,耙斗与耙斗小车一起下降,它们沿着清污机上的导槽及埋设在混凝土中的拦污栅的导槽下降,一直下降到拦污栅的顶部,这时耙斗小车与耙斗脱离,耙斗小车停在栅体的顶部,耙斗沿着栅体上的导槽继续下降,在提升指令下达后,耙斗先闭合并抓取污物上升,当耙斗上升到栅体顶部时,耙斗导向轮进入小车导槽并逐渐脱离栅体导槽,当耙斗全部进入小车后,会顶住小车上的限位块并与小车一起上升。为减轻小车重量,小车采用焊接结构件,一侧装导向轮,一侧装耙斗导槽。





2. 耙斗由活动耙齿和固定耙齿构成。在下降过程中,固定耙齿的*可以插入污物中,活动耙齿完成开耙动作;在提升过程中,固定耙齿可充当栅条的作用,活动耙齿完成闭耙动作并抓取污物。因此,当耙斗脱离栅体后,污物在活动耙齿与固定耙齿所形成的封闭框架中不至于散落。
3. 机架采用龙门架式结构,集污斗净高2.6m,可通过卡车来收集污物。整机较重,约30t.外形尺寸11m×8.9m×9.5m,为了便于运输和安装,我们将机架分成4大块,即左、右门架,上部支架及导槽,各部分采用高强螺栓联接。在导槽与机架间,我们还增设了多种规格的垫片,以便适合在现场调节清污机上的导槽与埋设在混凝土中导槽的对接尺寸。
4.电气控制系统:电气采用PLC(可编程逻辑控制器)来进行集中控制。它的优点是大大简化了电气线路,线路故障率大为降低,并且可以显示故障信息。PLC的再开发能力强,为满足工地特殊需要,只需调整程序或程序参数,而不需要改变电气线路。提升机构和行走机构的变速是通过变频器来实现的。在提升机构中,装有角向传感器和轴压式传感器,并装有深度和荷载综合显示仪,可对清污深度和荷载情况实施全过程的监控。根据现场需要,可随时调节清污深度的大小和对超欠载的设定。当提升钢丝绳过紧和下降钢丝绳过松,提升电机会自动断电并伴有超欠载的声光报警。
5. 提升机构和行走机构:为了***制动的可靠性,我们在提升机构上采用了双液压制动器。行走机构采用“三合一”减速机,并统一布置在轨道的上游侧。这样就***了左右行走的同步,并省去了分装在下游侧的差速器。实践证明这是可行的,而且省事。
6. 清污机行走定位系统:采用左右各两组行走限位开关,一组是预定位,清污机到达此位置时,行走减速,实施预定位;另一组是定位,清污机到达此位置时,行走制动,实施定位。这样就确保了清污机在每一孔进水口栅前的自动且准确定位。